请注意,本文编写于 185 天前,最后修改于 150 天前,其中某些信息可能已经过时。
目录
感谢秦晓卫老师的指导!!
一般的搜索问题
搜索问题可以形式化定义为
- 状态空间:所有可能状态的集合
- 初始状态和目标状态
- 动作与动作代价
- 转移模型:描述动作如何决定状态的转移
一个动作序列称为路径,解是从初始状态到目标状态的一条路径
树搜索与搜索树
树搜索是一个逐步扩展的过程,搜索过程可以形象化地构成一棵搜索树。可以这样描述搜索过程
- 初始化根节点为初始状态,根节点此时是唯一的叶子
- 根据搜索策略挑选某一个叶子进行扩展,若没有可扩展的叶子则搜索失败
- 若该叶子扩展出的节点中含有目标状态,则搜索成功返回结果;若没有,将这些节点加入搜索树中成为新的叶子,循环
1
Note
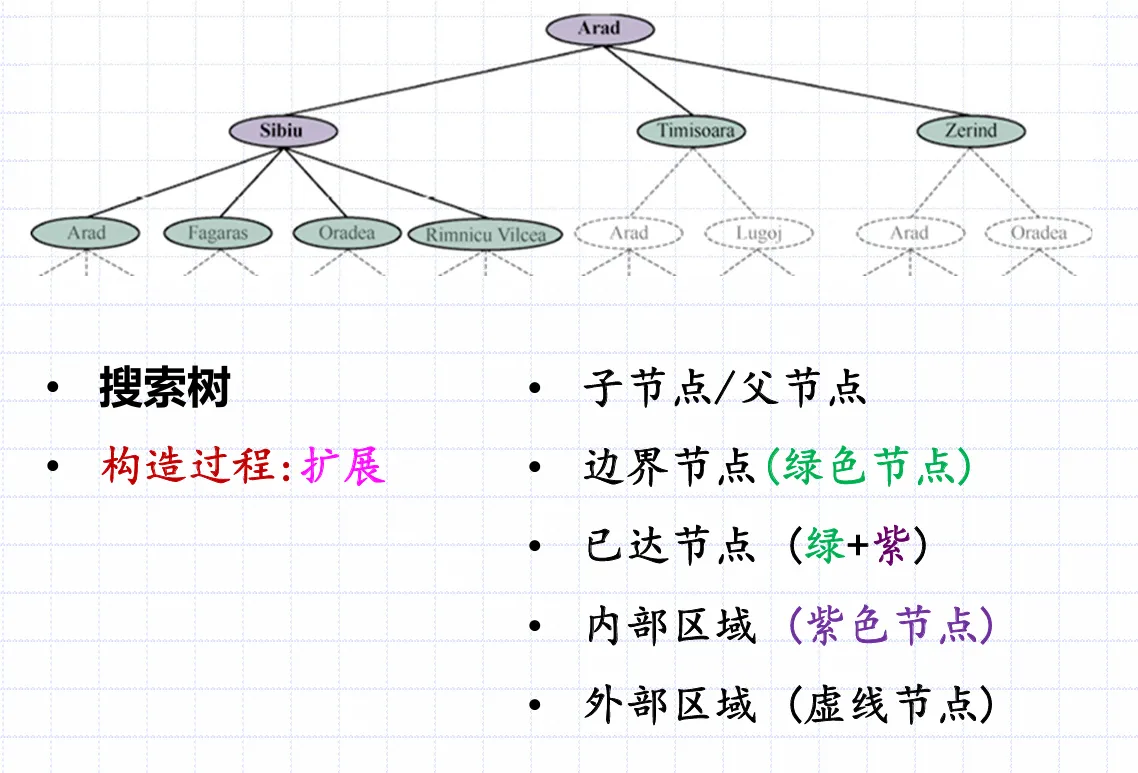
搜索策略就是扩展节点的顺序,构造搜索树的过程就是扩展
搜索树上的叶子称为边界节点,其他枝干称为内部区域;搜索树上的所有节点统一称为已达节点
边界节点适宜使用优先队列维护
Note
优先队列:优先弹出评价函数计算得到代价最小的节点
已达节点采用查找表的形式存储
无信息搜索:最佳优先搜索BFS(BestFirstSearch)
最佳优先搜索需要定义一个评价函数,不同的评价函数对应了不同的搜索算法。如评价函数可以为
- 节点的深度
- 根节点到节点的代价
- ...
若记 frontier 为边界节点集合,reached 为已达节点集合,那么最佳优先搜索可以描述如下
- 初始化
frontier为根,reached为空 - 从
frontier中弹出使得最小的节点,扩展其子节点 - 由子节点更新
reached集合与路径代价,并将子节点添加进入frontier集合 - 返回
1循环直到frontier为空或是找到目标状态
图搜索与状态空间图
可以将状态空间画为图,状态用节点表示,状态的转移关系对应节点的输出弧。一个简单的状态空间图如下
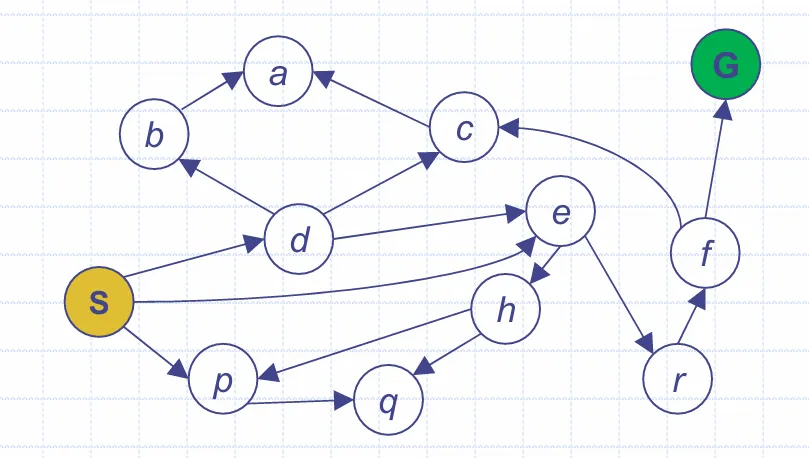
对于较复杂的状态转移关系,搜索树中会出现重复的节点,每个两个节点间存在多条 冗余路径
Note
检查冗余路径的搜索称为图搜索, 最佳优先搜索属于图搜索
本文作者:GBwater
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录