目录
感谢秦晓卫老师的指导!!
有信息搜索
有信息(启发式)搜索:在问题提供的定义之外, 还可利用关于目标状态的特定领域线索
线索以启发式函数(Heuristic Function)的形式出现, 记为
贪心最佳优先搜索
一个启发式函数的例子为
Note
=从节点n的状态到目标状态的最小代价路径的估计值
朴素的启发式搜索采取贪心的方式,即取评价函数为,这样每次会优先扩展使得启发式函数最小的节点。但是并不能保证正确性,会出现“朝着错误目标一路狂奔”的现象
A*搜索
A*搜索综合了UCS和贪心方案,取评价函数为
其中是初始状态到节点n的路径代价, 为节点n到目标状态的最短路径的代价估计值
A*搜索的最优性
定义 可容许性(admissible)启发式函数
可容许性启发式函数
函数永远不会高估某个目标的代价
一个可容许性启发式函数的例子是,若代价是空间的路径长度,那么
小于等于所有可能路径长度,是一个可容许性启发式函数。有定理
A*搜索的最优性
如果A搜索策略的启发式函数h(n)是可容许性的, 则A搜索策略一定是最优的
可以利用反证法证明。假定最优路径代价为,但是算法返回了,这意味着算法没有扩展出最优路径,也就是说最优路径上有节点没有被扩展到,记该节点为n
由于算法返回了代价,所有代价小于的节点都被扩展过了,也就是说
由于节点n在最优路径上,应当是最小的路径代价,那么
记真实的代价函数为,由于是可容许的,即,那么
而最优路径代价正是,这意味着
而一开始有
这是矛盾的,因而假设不成立。Q.E.D
定义 一致性(consistency)启发式函数
一致性启发式函数
每个以及由动作a生成的n的每个后继节点均满足条件
其中是从以动作a转移到的代价,可以参照示意图
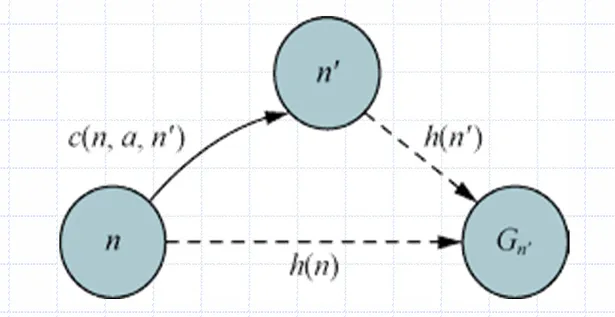
即满足“三角形两边之和大于第三边”的性质。有定理
A*搜索的最优性
若搜索策略的启发式函数是一致性的, 则A*搜索策略一定是最优的
松弛Relaxation
原问题去除部分约束获得问题称为松弛问题
Note
一个松弛问题的最优解的代价函数是原问题的可容许性启发式函数
这是因为松弛问题的最优解的代价总小于原问题的最优解。如下面这个问题
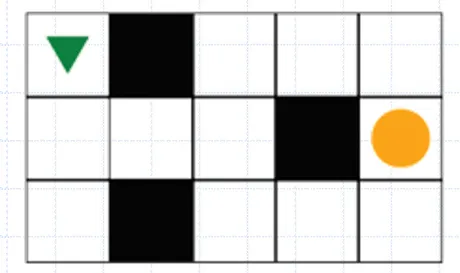
将将三角形挪到圆形位置,黑色方框为障碍物。考虑松弛问题,去除障碍物,此时的最优解代价就是 曼哈顿距离
本文作者:GBwater
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!